
Схемы управления электроприводами
Управление приводами включает в себя пуск электродвигателя в работу, регулирование скорости вращения, изменение направления вращения, торможение и останов электродвигателя. Для управления приводами применяются электрические коммутационные аппараты, такие как автоматические и неавтоматические выключатели, контакторы и магнитные пускатели. Для защиты электродвигателей от ненормальных режимов (перегрузок и коротких замыканий) применяются автоматические выключатели, предохранители и тепловые реле.
 Управление электродвигателями с короткозамкнутым ротором. На рис. 2.8 приведена схема управления асинхронным двигателем с короткозамкнутым ротором с помощью магнитного пускателя.
Управление электродвигателями с короткозамкнутым ротором. На рис. 2.8 приведена схема управления асинхронным двигателем с короткозамкнутым ротором с помощью магнитного пускателя.
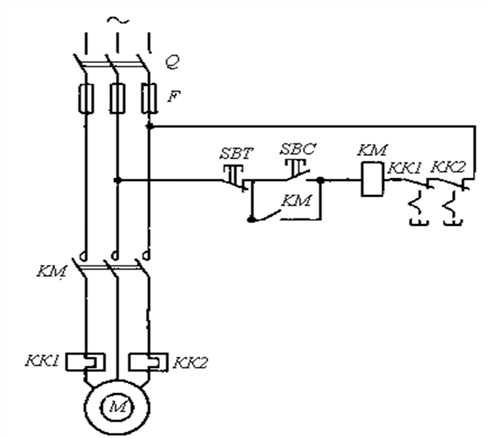
Рис. 2.8. Схема управления асинхронным электродвигателем с короткозамкнутым ротором с помощью магнитного пускателя: Q – выключатель; F – предохранитель;
КМ – магнитный пускатель, КК1, КК2 – тепловое реле; SBC – кнопочный выключатель включения двигателя; SBT – кнопочный выключатель отключения двигателя
Магнитные пускатели широко применяются для двигателей мощностью до 100 кВт. Они применяются в продолжительном иповторнократковременном режиме работы привода. Магнитный пускатель позволяет осуществлять дистанционный пуск. Для включения электродвигателя М первым включается выключатель Q. Пуск двигателя в работу осуществляется включением кнопочного выключателя SBС. Катушка (электромагнит включения) магнитного пускателя КМ получает питание от сети и замыкает контакты КМ в главной цепи и в цепи управления. Вспомогательный контакт КМ в цепи управления шунтирует кнопочный выключатель SBС и обеспечивает продолжительную работу привода после снятия нагрузки нажатия с кнопочного выключателя. Для защиты электродвигателя от перегрузки в магнитном пускателе имеются тепловые реле КК1 и КК2, включаемые в две фазы электродвигателя. Вспомогательные контакты этих реле включаются в цепь питания катушки КМ магнитного пускателя. Для защиты от коротких замыканий в каждой фазе главной цепи электродвигателя устанавливаются предохранители F. Предохранители могут устанавливаться и в цепи управления. В реальных схемах неавтоматический выключатель Q и предохранители Fмогут быть заменены автоматическим выключателем. Отключение электродвигателя осуществляется нажатием на кнопочный выключатель SBТ.
Простейшая схема управления электродвигателем может иметь только неавтоматический выключательQи предохранителиF или автоматический выключатель.
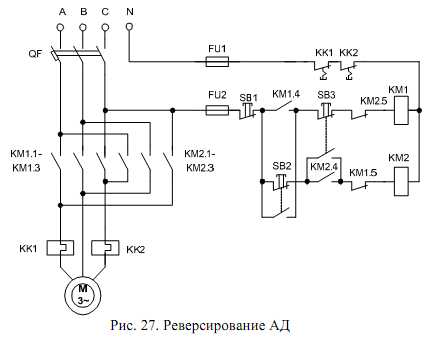
Во многих случаях при управлении электроприводом необходимо изменять направление вращения электродвигателя. Для этого применяются реверсивные магнитные пускатели.
На рис. 2.9 приведена схема управления асинхронным электродвигателем с короткозамкнутым ротором с помощью реверсивного магнитного пускателя. Для включения электродвигателя М должен быть включен выключатель Q. Включение электродвигателя для одного направления, условно «Вперед», производится нажатием кнопочного выключателя SBС1в цепи питания катушки КМ1 магнитного пускателя.При этом катушка (электромагнит включения) магнитного пускателя КМ1 получает питание от сети и замыкает контакты КМ1 в
главной цепи и в цепи управления. Вспомогательный контакт КМ1 в цепи управления шунтирует кнопочный выключатель SBС1 и обеспечивает продолжительную работу привода после снятия нагрузки нажатия с кнопочного выключателя.
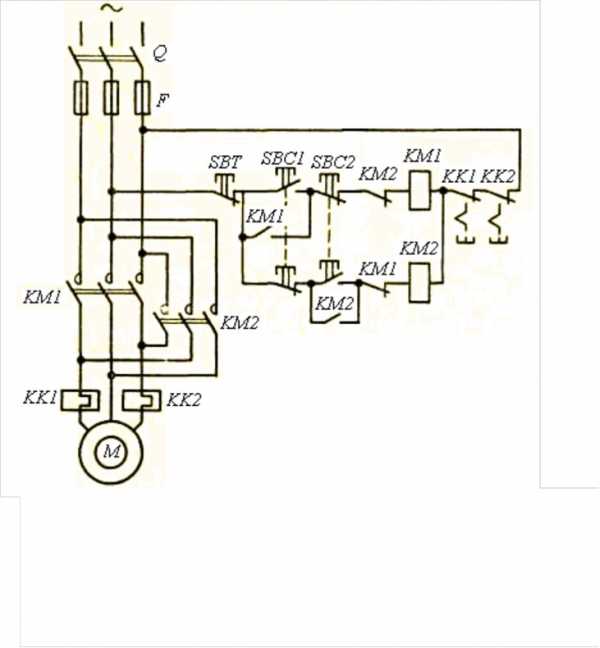
Рис. 2.9. Схема управления асинхронным электродвигателем с короткозамкнутым ротором
с помощью реверсивного магнитного пускателя: Q – выключатель; F – предохранитель; КМ1, КМ2 – магнитный пускатель, КК1, КК2 – тепловое реле; SBC1, SBC2 – кнопочный выключатель включения двигателя; SBT – кнопочный выключатель отключения двигателяДля пуска электродвигателя в противоположном направлении, условно
«Назад», необходимо нажать кнопочный выключатель SBС2. Кнопочные выключатели SBС1и SBС2 имеют электрическую блокировку, исключающую возможность одновременного включения катушек КМ1 и КМ2. Для этого в цепь катушки КМ1 включается вспомогательный контакт пускателя КМ2, а в цепь катушки КМ2 – вспомогательный контакт КМ1.
Для отключения электродвигателя от сети при его вращении в любом направлении необходимо нажать на кнопочный выключатель
Схема реверсивного включения может в обоснованных случаях применяться для торможения двигателя противовключением.
Управление электродвигателями с фазным ротором. На рис. 2.10 приведена схема управления асинхронным двигателем с фазным ротором.
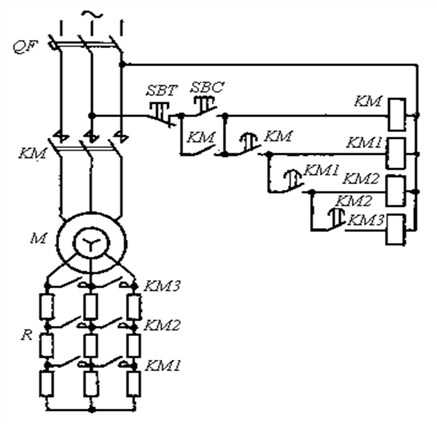 Рис. 2.10. Схема управления асинхронным двигателем
Рис. 2.10. Схема управления асинхронным двигателем
с фазным ротором: QF – выключатель; КМ – магнитный пускатель в цепи статора, КМ1 – КМ3 – магнитный пускатель ускорения; SBC – кнопочный выключатель включения двигателя;R – пусковой реостат; SBT – кнопочный выключатель отключения двигателя
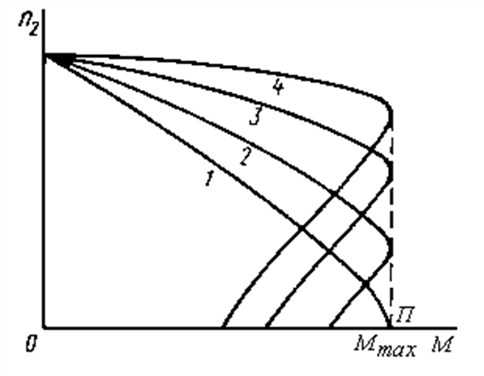 В приведенной схеме защита двигателя М от коротких замыканий и перегрузок осуществляется автоматическим выключателем QF. Для уменьшения пускового тока и увеличения пускового момента в цепь ротора включен трехступенчатый пусковой реостат R. Количество ступеней может быть различным. Пуск электродвигателя осуществляется линейным контактором КМ и контакторами ускорения КМ1 – КМ3. Контакторы снабжены реле времени. После включения автоматического выключателя QF кнопочным выключателем SBC включается линейный контактор КМ, который мгновенно замыкает свои контакты в главной цепи и шунтирует контакты кнопочного выключателя SBC. Двигатель начинает вращаться при полностью введенном пусковом реостате R (механическая характеристика 1 на рис. 2.11). Точка П является точкой трогания.
В приведенной схеме защита двигателя М от коротких замыканий и перегрузок осуществляется автоматическим выключателем QF. Для уменьшения пускового тока и увеличения пускового момента в цепь ротора включен трехступенчатый пусковой реостат R. Количество ступеней может быть различным. Пуск электродвигателя осуществляется линейным контактором КМ и контакторами ускорения КМ1 – КМ3. Контакторы снабжены реле времени. После включения автоматического выключателя QF кнопочным выключателем SBC включается линейный контактор КМ, который мгновенно замыкает свои контакты в главной цепи и шунтирует контакты кнопочного выключателя SBC. Двигатель начинает вращаться при полностью введенном пусковом реостате R (механическая характеристика 1 на рис. 2.11). Точка П является точкой трогания.
Рис. 2.11. Механические характеристики асинхронного двигателя с фазным ротором: 1
при включении ступеней пускового реостата; 4 – естественная;
П – точка пуска;
Контакт реле времени КМ в цепи катушки контактора КМ1 с выдержкой времени t1 (рис. 2.12) включает контактор КМ1, который замыкает контакты первой ступени в цепи пускового реостата. С выдержкой времени t2включается контактор КМ2. Аналогично проходит процесс переключения ступеней пускового реостата R до перехода электропривода на естественную характеристику (кривая 4).
Изменение тока статора Iи частоты вращения ротора n2во время пуска электродвигателя показано на рис. 2.12.
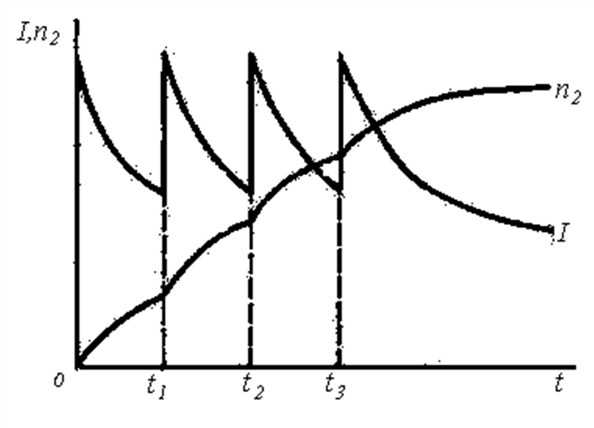 Рис. 2.12. Изменение тока статора и частоты вращения ротора асинхронного двигателя с фазным ротором во время пуска
Рис. 2.12. Изменение тока статора и частоты вращения ротора асинхронного двигателя с фазным ротором во время пуска
На естественной характеристике ток статора и частота вращения ротора достигают номинальных значений.
Остановка электродвигателя осуществляется кнопочным выключателем SBT.
Электрическая блокировка в приводах. В многодвигательных приводах или приводах механизмов, связанных общей технологической зависимостью, должна быть обеспечена определенная очередность включения и отключения электродвигателей. Это достигается применением механической или электрической блокировки. Электрическая блокировка осуществляется путем применения дополнительных вспомогательных контактов коммутационных аппаратов, участвующих в управлении приводами. На рис. 2.13 приведена схема блокировки последовательности пуска и остановки двух электродвигателей.
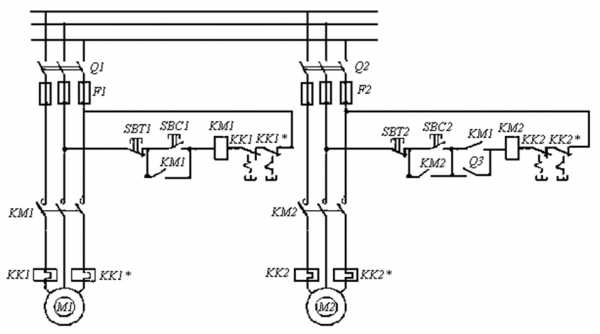
Рис. 2.13. Схема блокировки последовательности управления двух электродвигателей: Q1, Q2 – выключатель; F1, F2 – предохранитель; КМ1, КМ2 – магнитный пускатель, КК1
В схеме исключена возможность пуска электродвигателя М2 раньше пуска двигателя М1. Для этого в цепь управления магнитного пускателя КМ2, осуществляющего пуск и остановку электродвигателя М2, включен замыкающий вспомогательный контакт КМ1, связанный с пускателем КМ1. В случае остановки электродвигателя М1 этот же контакт произведет автоматическое отключение двигателя М2. При необходимости самостоятельного пуска электродвигателя при опробовании механизма в цепи управления имеется выключатель Q3, который необходимо предварительно замкнуть. Включение электродвигателя М2 осуществляется кнопочным выключателем SBC2, а отключение – SBТ2. Включение двигателя М1 осуществляется выключателем SBC1, а отключение – SBT1. При этом отключается и выключатель М2.
Регулирование скорости рабочего органа машины или механизма. Скорость рабочего органа машины можно изменить за счет применения редукторов или путем изменения частоты вращения электродвигателя. Частоту вращения электродвигателя можно изменить несколькими способами. В строительных машинах и механизмах применяют редукторы с зубчатой, ременной и цепной передачами, позволяющими изменять передаточное число. В приводах, где применяются двигатели с короткозамкнутым ротором, частоту вращения электродвигателя изменяют путем изменения числа пар полюсов. Для этих целей применяют либо электродвигатель с двумя обмотками статора, каждая из которых имеет разное количество пар полюсов, либо электродвигатель с переключением секций фазных обмоток статора.
Возможно регулирование частоты вращения изменением напряжения на обмотке статора. Для этих целей используются автотрансформаторы с плавным регулированием напряжения, магнитные усилители, тиристорные регуляторы напряжения.
www.eti.su
Типовые схемы управления электроприводами с асинхронными двигателями
Типовые схемы релейно-контакторного управления асинхронными двигателями (АД) строятся по тем же принципам, что и схемы управления двигателями постоянного тока.
Типовые схемы управления ад с короткозамкнутым ротором
Двигатели этого типа малой и средней мощности обычно пускаются прямым подключением к сети без ограничения пусковых токов. В этих случаях они управляются с помощью магнитных пускателей, которые одновременно обеспечивают и некоторые виды их защиты.
Схема управления асинхронным двигателем с использованием магнитного пускателя (рис. 2.1) включает в себя магнитный пускатель, состоящий из контактора КМ и трех встроенных в него тепловых реле защиты КК. Схема обеспечивает прямой (без ограничения тока и момента) пуск двигателя, отключение его от сети, а также защиту от коротких замыканий (предохранители FА) и перегрузки (тепловые реле КК).
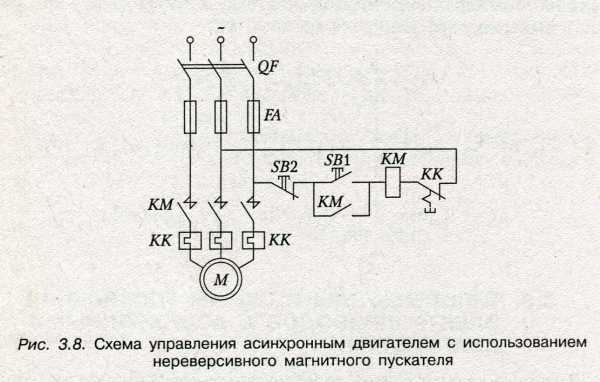
Рис. 2.1. Схема управления АД с использованием
нереверсивного магнитного пускателя
Для пуска двигателя замыкают выключатель QF и нажимают кнопку пуска SВ1. Получает питание катушка контактора КМ, который, включившись, своими главными силовыми контактами в цепи статора двигателя подключает его к источнику питания, а вспомогательным контактом шунтирует кнопку SВ1. Происходит разбег двигателя по его естественной характеристике. Для отключения двигателя нажимается кнопка остановки SВ2, контактор КМ теряет питание и отключает двигатель от сети. Начинается процесс торможения двигателя выбегом под действием момента нагрузки на его валу.
Реверсивная схема управления ад.
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1 и КМ2 и два тепловых реле защиты КК (рис. 2.2). Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении.
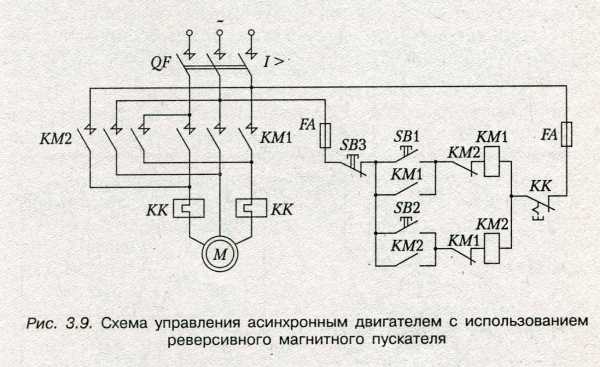
Рис. 2.2. Схема управления АД с использованием реверсивного магнитного пускателя
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FА). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1 и КМ2).
Пуск двигателя при включенном QF в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SВ1 или SВ2. Это приводит к срабатыванию контактора КМ1 или КМ2, подключению двигателя к сети и его разбегу.
Для реверса или торможения двигателя вначале нажимается кнопка SВЗ, что приводит к отключению включенного до сих пор контактора (например, КМ1), после чего нажимается кнопка SВ2.
Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Магнитное поле двигателя изменяет свое направление вращения на противоположное, что приводит к началу процесса реверса. Этот процесс состоит из двух этапов: торможения противовключением и разбега в противоположную сторону.
В случае необходимости только торможения двигателя при достижении им нулевой частоты вращения должна быть вновь нажата кнопка SВЗ, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Если кнопка SВЗ нажата не будет, то это приведет к разбегу двигателя в другую сторону, т.е. к его реверсу.
Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SВ1 и SВ2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата КМ2 и, наоборот.
Следует отметить, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании.
Схема управления многоскоростным АД.
Эта схема (рис. 2.3) обеспечивает получение двух скоростей двигателя путем соединения секций (полуобмоток) обмотки статора в треугольник или двойную звезду, а также его реверсирование. Защита электропривода осуществляется тепловыми реле КК1 и КК2 и предохранителями FА.
Рис. 2.3. Схема управления двухскоростным АД
Для пуска двигателя на низкую частоту вращения нажимается кнопка SВ4, после чего срабатывает контактор КМ2 и блокировочное реле КV. Статор двигателя оказывается включенным по схеме треугольника, а реле КV, замкнув свои контакты в цепях катушек аппаратов КМЗ и КМ4, подготавливает подключение двигателя к источнику питания. Далее нажатие кнопки SВ1 или SВ2 приводит к включению соответственно в направлении «Вперед» или «Назад».
После разбега двигателя до низкой частоты вращения может быть осуществлен его разгон до высокой частоты вращения. Для этого нажимается кнопка SВ5, что приведет к отключению контактора КМ2 и включению контактора КМ1, обеспечивающему переключение секций обмоток статора с треугольника на двойную звезду.
Остановка двигателя производится нажатием кнопки SВ3, что вызовет отключение всех контакторов от сети и торможение двигателя выбегом.
Применение в схеме двухцепных кнопок управления не допускает одновременного включения контакторов КМ1 и КМ2, КМ3 и КМ4. Этой же цели служит перекрестное включение размыкающих блок-контактов контакторов КМ1 и КМ2, КМ3 и КМ4 в цепи их катушек.
Схема управления АД, обеспечивающая прямой пуск и динамическое торможение в функции времени
Пуск двигателя осуществляется нажатием кнопки SВ1 (рис. 2.4), после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.
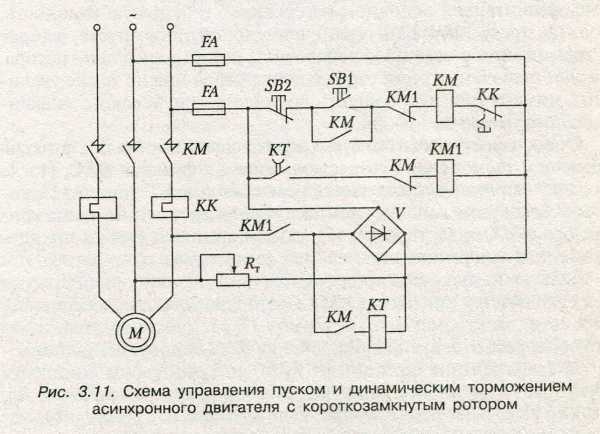
Рис. 2.4. Схема управления пуском и динамическим торможением АД с короткозамкнутым ротором
Для остановки двигателя нажимается кнопка SВ2, Контактор КМ отключается, размыкая свои контакты в цепи статора двигателя и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт КМ в цепи аппарата КМ1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора постоянного тока от выпрямителя V через резистор Rт и переводу двигателя в режим динамического торможения.
Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова двигателя, реле КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется резистором Rт, с помощью которого устанавливается необходимый постоянный ток в статоре двигателя.
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов.
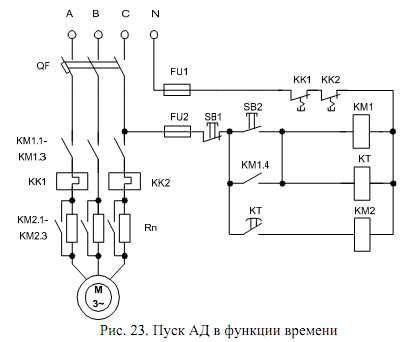
Типовые схемы управления АДс фазным ротором. Схемы управления двигателя с фазным ротором, которые рассчитаны в основном на среднюю и большую мощность, должны предусматривать ограничение токов при их пуске, реверсе и торможении с помощью добавочных резисторов в цепи ротора. За счет включения резисторов в цепь ротора можно также увеличить момент при пуске вплоть до уровня критического (максимального) момента.
Схема одноступенчатого пуска АД в функции времени и торможения противовключением в функции ЭДС
После подачи напряжения включается реле времени КТ (рис. 2.5), которое своим размыкающим контактом разрывает цепь питания контактора КМ3, предотвращая тем самым его включение и преждевременное закорачивание пусковых резисторов в цепи ротора.
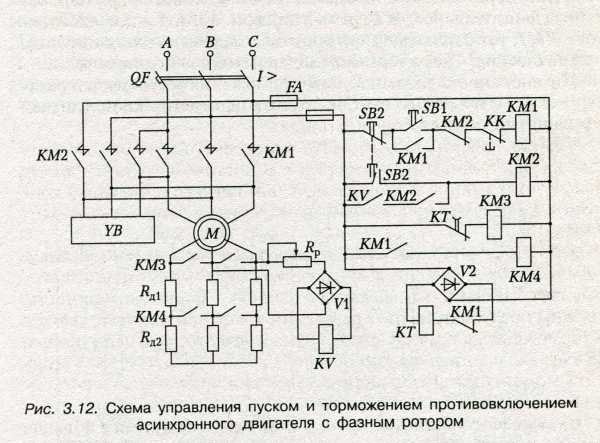
Рис.2.5. Схема управления пуском и торможением противовключением АД с фазным ротором
Включение двигателя производится нажатием кнопки SВ1, после чего включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YВ растормаживается, и начинается разбег двигателя. Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения Rд2, а также разрывает цепь катушки реле времени КТ. Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор Rд1, в цепи ротора, и двигатель выходит на свою естественную характеристику.
Управление торможением обеспечивает реле торможения KV, контролирующее уровень ЭДС (частоты вращения) ротора. С помощью резистора Rp, оно отрегулировано таким образом, что при пуске, когда скольжение двигателя 0 < s < 1, наводимая в роторе ЭДС будет недостаточна для включения, а в режиме противовключения, когда 1 < s < 2, уровень ЭДС достаточен для его включения.
Для осуществления торможения двигателя нажимается сдвоенная кнопка SВ2, размыкающий контакт которой разрывает цепь питания катушки контактора КМ1. После этого двигатель отключается от сети и разрывается цепь питания контактора КМ4 и замыкается цепь питания реле КТ. В результате этого контакторы КМ3 и КМ4 отключаются и в цепь ротора двигателя вводится сопротивление Rд1 + Rд2.
Нажатие кнопки SВ2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Двигатель переходит в режим торможения противовключением. Реле КV срабатывает и после отпускания, кнопки SВ2 будет обеспечивать питание контактора КМ2 через свой контакт и замыкающий контакт этого аппарата.
В конце торможения, когда частота вращения будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2. Последний, потеряв питание, отключит двигатель от сети, и схема придет в исходное состояние. После отключения КМ2 тормоз YВ, потеряв питание, обеспечит фиксацию (торможение) вала двигателя.
Схема одноступенчатого пуска АД в функции тока и динамического торможения в функции частоты вращения
Схема (рис. 2.6) включает в себя контакторы КМ1, КМ2 и КМ3; реле тока КА; реле контроля частоты вращения SR, промежуточное реле KV; понижающий трансформатор для динамического торможения Т; выпрямитель VD. Максимальная токовая защита осуществляется предохранителями FA1 и FA2, защита от перегрузки двигателя – тепловыми реле КК1 и КК2.
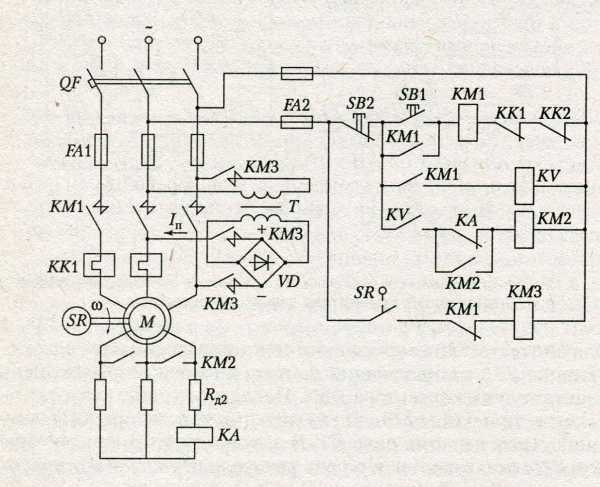
Рис. 2.6. Схема управления пуском и динамическим торможением АД с фазным ротором
Схема работает следующим образом. После подачи с помощью автоматического выключателя QFнапряжения для пуска двигателя нажимается кнопка SВ1, включается контактор КМ1, силовыми контактами которого статор двигателя подключается к сети. Бросок тока в цепи ротора вызовет включение реле тока КА и размыкание цепи контактора ускорения КМ2. Тем самым разбег двигателя начнется с пусковым резистором Rд2 в цепи ротора.
Включение контактора КМ1 приводит также к шунтированию кнопки SВ1, размыканию цепи катушки контактора торможения КМ3 и включению промежуточного реле напряжения КV, что, тем не менее, не приведет к включению контактора КМ2, так как до этого в этой цепи разомкнулся контакт реле КА.
По мере увеличения частоты вращения двигателя уменьшаются ЭДС и ток в роторе. При некотором значении тока в роторе, равном току отпускания реле КА, оно отключится и своим размыкающим контактом замкнет цепь питания контактора КМ2. Тот включится, зашунтирует пусковой резистор Rд2, и двигатель выйдет на свою естественную характеристику.
Следует отметить, что вращение двигателя вызовет замыкание контакта реле частоты вращения SR в цепи контактора КМ3, однако он не сработает, так как до этого разомкнулся контакт контактора КМ1.
Для перевода двигателя в тормозной режим нажимается кнопка SВ2. Контактор КМ1 теряет питание и отключает АД от сети переменного тока. Благодаря замыканию контактов КМ1 включится контактор торможения КМ3, контакты которого замкнут цепь питания обмотки статора от выпрямителя VD), подключенного к трансформатору Т, и тем самым двигатель переводится в режим динамического торможения. Одновременно с этим потеряют питание аппараты КV и КМ2, что приведет к вводу в цепь ротора резистора Rд2. Двигатель начинает тормозиться.
При частоте вращения двигателя, близкой к нулю, реле контроля частоты вращения SR разомкнет свой контакт в цепи катушки контактора КМ3. Он отключится и прекратит торможение двигателя. Схема придет в исходное положение и будет готова к последующей работе.
Принцип действия схемы не изменится, если катушку реле тока КА включить в фазу статора, а не ротора.
studfiles.net
Электрические схемы управления электроприводами
Электрические схемы управления электроприводами
Обычно применяется две разновидности схем электрических соединений: принципиальные и монтажные.
На принципиальных схемах изображаются электрические связи между элементами установок в той последовательности, в которой они действуют в соответствии с назначением схемы. Территориальное расположение аппаратуры управления и приборов в этих схемах не показывается.
На монтажных схемах показываются электрические соединения аппаратов и приборов, кроме этого даются символы и условные обозначения, количество, сечение и марки электропроводов.
Приборы и аппаратура размещаются на монтажной схеме строго в соответствии с расположением в электротехнической установке. При этом, однако, соблюдение масштаба не обязательно, так как схемы предназначаются только для выполнения монтажа цепей оперативного тока.
Аппаратура управления — контакты и другие элементы — изображается в схемах в нормальном положении, т. е. в таком, когда на аппарат не действуют из вне.
Все силовые цепи на схеме вычерчиваются толстыми линиями, а цепи управления — тонкими линиями.
Монтажные схемы применительно к управлению электроприводом получили названия схем внешних соединений.
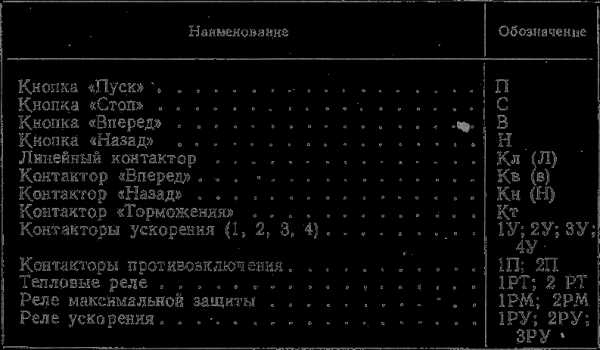
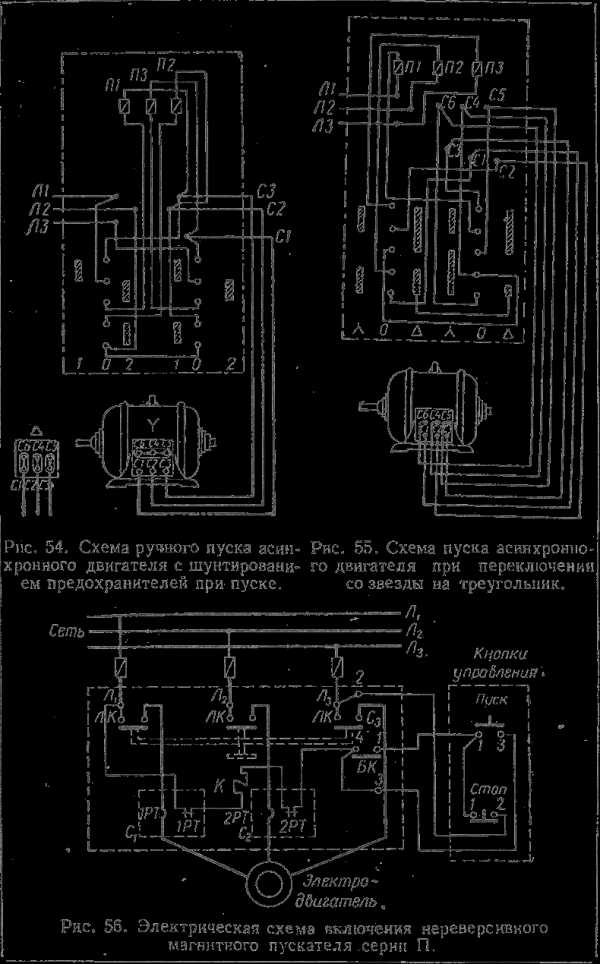
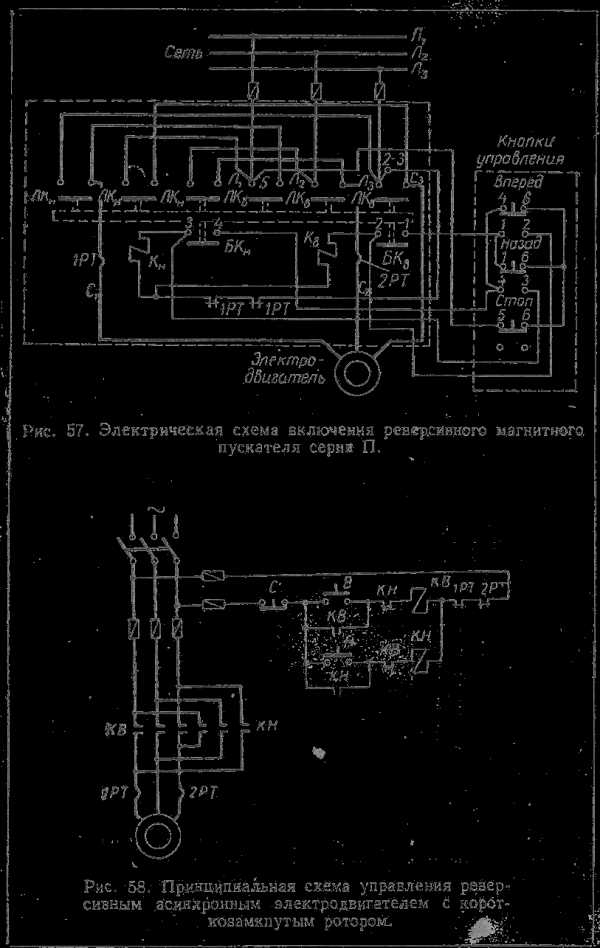
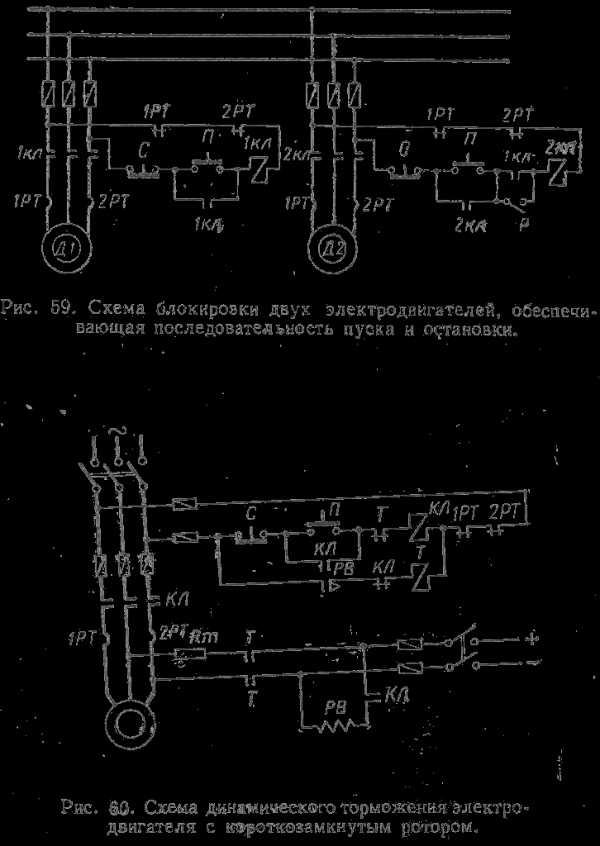
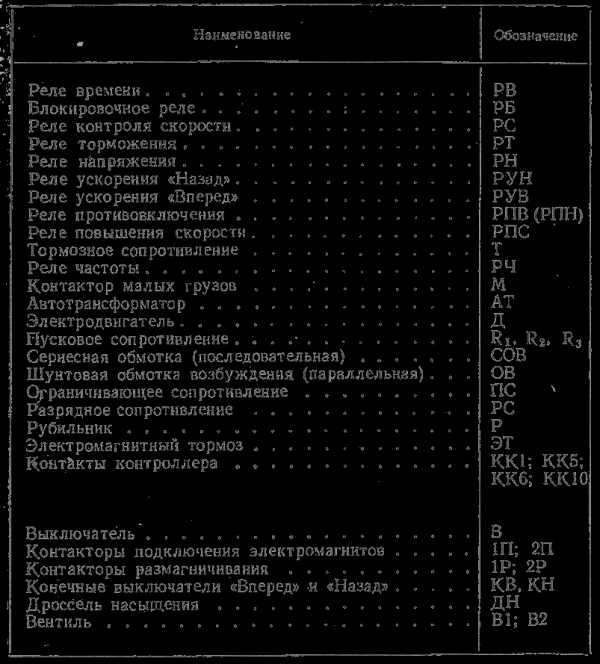
Буквенные обозначения аппаратуры управления схем электропривода
На принципиальных схемах, приведённых в справочнике (рис. 54—63), имеются следующие условные буквенные обозначения аппаратуры управления электропривода:

trudova-ohrana.ru
Электропривод и его основные компоненты
Электрический привод, сокращенно электропривод – электромеханическая система, состоящая в общем случае из взаимодействующих преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса [1].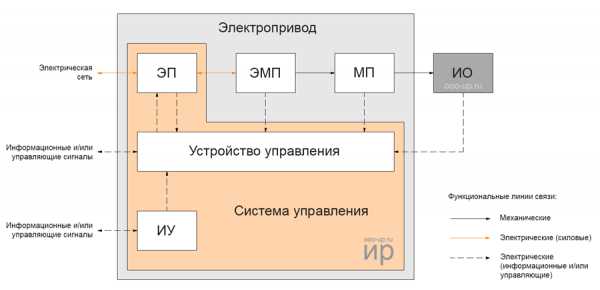
Функциональная схема электропривода, где ЭП – электрический преобразователь, ИУ – информационное устройство, ЭМП – электромеханический преобразователь (электродвигатель), МП – механический преобразователь, ИО – исполнительный орган.
Основные компоненты
Электродвигатель
Электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую.
Система управления электропривода
Совокупность управляющих и информационных устройств и устройств сопряжения электропривода, предназначенных для управления электромеханическим преобразованием энергии с целью обеспечения заданного движения исполнительного органа рабочей машины.
Механический преобразователь
Предназначен для передачи механической энергии от электродвигателя к исполнительному органу рабочей машины и согласованию вида и скоростей их движения.
- Вращательный
- Прямолинейный
- Поступательный
- Со сложным движением
Полезная информация
База знаний
Описание разных видов электромеханических преобразователей и электрических машин в частности. Ключевые даты истории создания электродвигателя.
engineering-solutions.ru
13.4. Типовые схемы управления асинхронными электроприводами
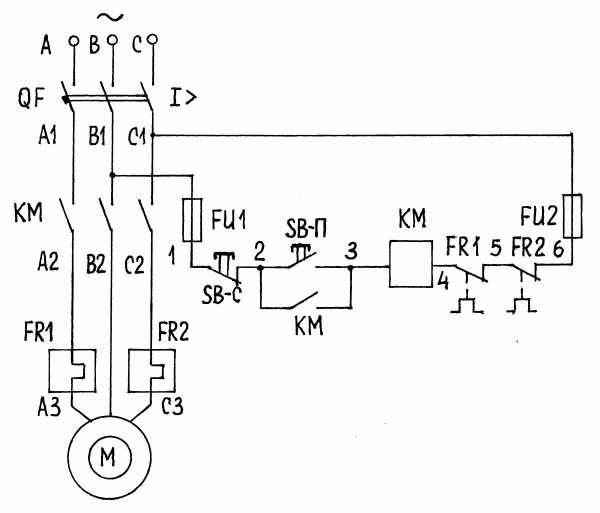
Схема управления нереверсивным электроприводом с асинхронным двигателем с короткозамкнутым ротором без использования электрического торможения приведена на рис.13.1. В схеме реализуется пуск электродвигателя прямым подключением обмотки статора к питающей сети и работа в продолжительном режиме. Схема содержит следующие аппараты:
QF – автоматический выключатель (в дальнейшем автомат) с максимально-токовым расцепителем;
КМ – контактор или пускатель;
FR1 и FR2 – тепловые реле;
FU1 и FU2 – предохранители;
SB-П («Пуск») и SB-С («Стоп») – кнопки пуска и остановки электропривода.
 В
исходном поло-жении схемы вклю-чён
автомат QF.
Пуск электропривода осу-ществляется
нажатием кнопки SB-П.
При этом подаётся питание на катушку
КМ. Кон-тактор включается и замыкает
свои сило-вые контакты, подключая
статорную об-мотку к питающей се-ти.
После пуска д
В
исходном поло-жении схемы вклю-чён
автомат QF.
Пуск электропривода осу-ществляется
нажатием кнопки SB-П.
При этом подаётся питание на катушку
КМ. Кон-тактор включается и замыкает
свои сило-вые контакты, подключая
статорную об-мотку к питающей се-ти.
После пуска д
Рис.13.1. Схема управления нереверсивным электроприводом с асинхронным к.з.двигателем
вига-тель работает на естественной характеристике. Срабатывая ко-нтактор КМ замыкает свой вспомогательный контакт, включённый параллельно кнопкеSB-П, и становится на самопитание.Чтобы остановить электропривод, нажимают кнопку SB-С («Стоп»), катушка КМ теряет питание и контактор отключает статорную цепь от питающей сети. Схема возвращается в исходное состояние.
Электропривод останавливается под действием статического момента электропривода Мс, который определяется технологией работы механизма.
В схеме имеются следующие защиты. Нулевая защита, которая реализуется контактором КМ, так как управление схемой осуществляется от кнопок. При кратковременном исчезновении питающего напряжения или значительном его снижении контактор КМ отключается, и схема возвращается в исходное состояние.
Максимально-токовая защита в силовых цепях выполняется автоматом QF за счёт использования в нём максимально-токового расцепителя с уставкой срабатывания 1114Iн. При возникновении короткого замыкания в силовой цепи, срабатывает максимально-токовый расцепитель и автомат отключает статорную цепь и электропривод в целом.
Максимально-токовая защита в цепях управления осуществляется предохранителями FU1 и FU2, номинальный ток которых Iн.пр=1,21,3Iмакс.нагр.
Тепловая защита двигателя выполняется тепловыми реле FR1, FR2, размыкающие контакты которых включены в цепь катушки контактора КМ. При срабатывании одного из тепловых реле контактор КМ отключается, и схема возвращается в исходное состояние. Повторно она может быть включена после остывания теплового реле и двигателя.
Некоторые технологии требуют, чтобы процесс остановки электропривода протекал интенсивнее, чем только под действием статического момента. В этом случае в схемах управления используют различные виды электрического торможения – динамическое торможение и торможение противовключением, а также механическое торможение с помощью электромагнитных тормозов.
На рис.13.2 приведена принципиальная схема нереверсивного электропривода, которая позволяет производить пуск и остановку электродвигателя с динамическим торможением.
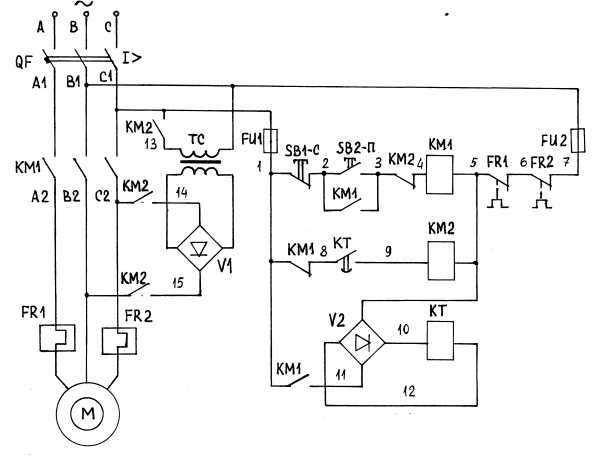
Рис.13.2. Схема нереверсивного асинхронного электропривода с динамическим торможением
Питание на схему подаётся автоматическим выключателем QF, напряжение переменного тока на обмотку статора – линейным контактором КМ1, напряжение постоянного тока – контактором динамического торможения КМ2. Источник постоянного тока содержит трансформатор Т и выпрямитель V1, подключаемые к сети контактором КМ2 только в режиме торможения.
Команда на пуск подаётся кнопкой SB2-П, а команда на остановку подаётся кнопкой SBC. При ее нажатии включается контактор КМ1, и двигатель подключается к сети. Для остановки двигателя нажимают кнопку SB1-C, контактор КМ1 отключается и отключает двигатель от сети переменного тока. Одновременно нормально закрытым (н.з.) блок-контактом КМ1 включается контактор КМ2, подающий в обмотки статора двигателя постоянный ток. Двигатель переходит в режим динамического торможения. Длительность подачи постоянного тока в обмотки статора контролируется реле времени КТ. После отключения катушки КТ его контакт в цепи катушки КТ2 с выдержкой времени размыкается.
В схеме применены нулевая, максимально-токовая и тепловая защиты, осуществляемая соответственно линейным контактором КМ1, автоматическим выключателем QF с максимально-токовым расцепителем и токовыми реле FR1 и FR2. Схема управления защищена предохранителями FU1 и FU2. При срабатывании любой из защит отключается линейный контактор КМ1. Используемая в схеме блокировка контактами 3-4 и 1-8 запрещает одновременное срабатывание контакторов КМ1 и КМ2.
Когда по условиям технологического процесса необходимо значительно ускорить процесс торможения, то применяют торможение противовключением. Схема реверсивного асинхронного электропривода, в которой реализуется торможение противовключением приведена на рис.13.3. Исходя из условий эксплуатации электропривода схема управления питается пониженным стандартным напряжением от трансформатора ТС.
Схема позволяет осуществлять прямой пуск, реверс и остановку электропривода торможением противовключением с контролем по скорости. При этом в качестве чувствительного элемента используется электромеханическое реле контроля скорости SR, устанавливаемое на валу электродвигателя. Оно замыкает свои контакты SR(B) или SR(Н) при скорости SR0,01н.дв.
Управляющие команды подаются в схему кнопками управления SB2 («Вперёд»), SB3(«Назад») и SB1 («Стоп») в зависимости от требуемого по технологии направления вращения. Напряжение на обмотку статора подаётся контакторами КМ1(В), чередование фаз АВС, и КМ2(Н), чередование фаз СВА. Кнопка остановки электропривода SB1(C) включена в цепь катушки реле торможения КТ, которое организует режим торможения противовключения при любом направлении вращения. В цепях катушек контакторов КМ1(В) и КМ2(Н) находятся блокировочные контакты 5-6 (SB3), 6-7(KM2) и 12-13(SB2) 13-14(КМ1), предотвращающие одновременное срабатывание этих контакторов.
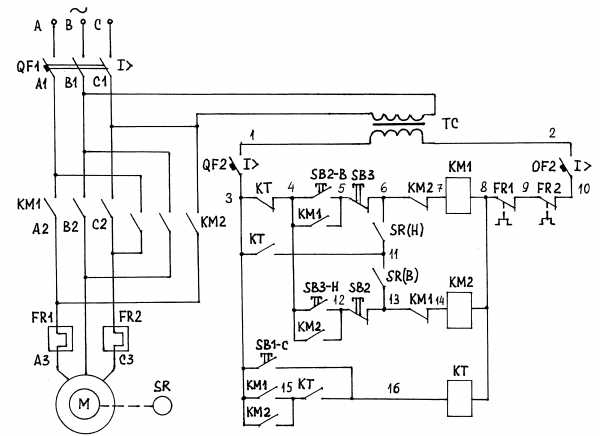
Рис.13.3. Схема реверсивного асинхронного электропривода с торможением противовключением
Управление электроприводом осуществляется следующим образом. При нажатии кнопки SB2-B образуется цепь питания катушки КМ1, контактор КМ1 срабатывает и подключает статорную обмотку асинхронного электродвигателя к питающей сети и происходит прямой пуск по характеристике, показанной на рис.4.19.
При срабатывании контактора КМ1-В замыкается контакт 4-5 (КМ1-В), шунтирующий кнопку SB2-В, и контактор становится на самопитание. Одновременно в цепи катушки КМ2-Н размыкается блокировочный контакт 13-14 (КМ-В), в цепи катушки реле торможения КТ замыкается контакт 3-15(КМ1-В). При разгоне электродвигателя срабатывает реле контроля скорости и замыкает свой контакт 11-13(SR-H), подготавливая схему к остановке электропривода, если будет нажата кнопка SB1-С(“Стоп”).
Для реверсирования электропривода нужно нажать кнопку SB3-Н. После этого размыкается блокирующий контакт 5-6(SB3) в цепи катушки КМ1. Контактор КМ1 отключает статор двигателя от питающей сети. Одновременно в цепи катушки КМ2 замыкается блокирующий контакт 13-14(КМ1). Катушка КМ2 получает питание, и контактор КМ2 подключает статорную обмотку к питающей сети, изменив чередование фаз. Магнитное поле электродвигателя начинает вращаться в противоположном направлении, а ротор по инерции вращается в прежнем направлении. Поэтому асинхронный двигатель переходит в режим торможения противовключением до полной остановки, а затем разгоняется в направлении «Назад». Этот процесс показан на рис.4.19. При разгоне «Назад» реле контроля скорости замыкает свой контакт 11-6(SR-B), подготавливая схему к остановке. В цепи катушки реле торможения КТ контактор замыкает 3-15(КМ2). При нажатии кнопки SB1-C катушка реле торможения КТ получает питание и реле КТ срабатывает, размыкая контакт 3-4(КТ) и замыкая контакт 3-11(КТ). Контактор КМ2 теряет питание и отключает статорную обмотку от питающей сети. При этом контактор КМ2 замыкает свой блокировочный контакт 6-7(КМ2) в цепи катушки КМ1. Контактор КМ1 срабатывает, так как катушка КМ1-В получает питание по цепи 3-1(КТ), 11-6(SR-H), 6-7(КМ2). Статорная обмотка подключается прямым чередованием фаз, «Вперёд», а ротор вращается по инерции в направлении «Назад». Поэтому асинхронный двигатель переходит в режим торможения противовключением. Тормозной момент электропривода в режиме торможения Мт=-(Мс-Мпв). Когда скорость снизится практически до нуля, реле контроля скорости SR разомкнёт свой контакт 3-11 (КТ) и катушка КМ1 потеряет питание, а контактор КМ1 отключит статорную обмотку от питающей сети.
В технологических установках применяются электроприводы с двухскоростными асинхронными электродвигателями, у которых ступенчатое регулирование скорости достигается за счёт изменения числа пар полюсов путём изменения схемы включения специально выполненной статорной обмотки (см.§4.4).
На рис.13.4 приведена схема нереверсивного электропривода с двухскоростным асинхронным двигателем. В схеме предусмотрено переключение статорной обмотки с треугольника на двойную звезду (/). Такая схема применяется в электроприводах механизмов, если по технологии требуется регулирование скорости с постоянной мощностью на рабочем органе. Механические характеристики электропривода по схеме рис.13.4 приведены на рис.4.21.
Управляющие команды в схему подаются трёхпозиционным командоконтроллером SM. В исходном положении, когда включены автоматы QF1 и QF2 и командоконтроллер находится в нулевом (левом) положении, срабатывает реле напряжения KV и своим контактом KV становится на самопитание.
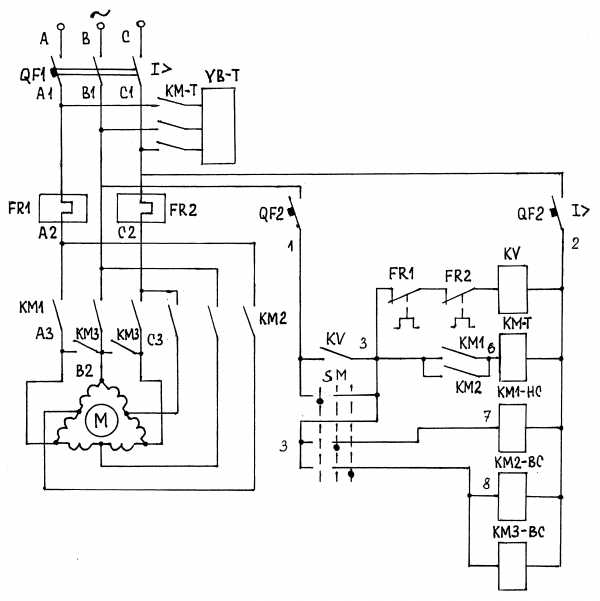
Рис.13.4. Схема включения двухскоростного асинхронного двигателя
При переключении командоконтроллера в первое положение (НС) получает питание катушка контактора КМ1(НС), контактор срабатывает, замыкает свой контакт 3-6 в цепи катушки тормозного контактора КМТ и подключает статорную обмотку, включённую в треугольник (), к сети. В тоже время тормозной контактор КМТ срабатывает и подаёт питание на электромагнит тормоза, тормоз растормаживается (поднимаются колодки), и электродвигатель пускается на низкую скорость (число пар полюсов 2р).
При переключении командоконтроллера во второе положение (ВС) катушка контактора КМ1(НС) отключает статорную обмотку от сети. Катушки контакторов КМ2(ВС) и КМ3(ВС) получают питание и контакторы срабатывают. Контактор КМ3(ВС), замыкая свои контакты, образует нулевую точку двойной звезды. Контактор КМ2(ВС) замыкает свой контакт 3-6 в цепи катушки тормозного контактора КМТ, контактор КМТ срабатывает или остаётся включённым. Одновременно контактор КМ2(ВС) подключает вершину двойной звезды статорной обмотки и двигатель пускается на высокую скорость (число пар полюсов р), как показано рис.4.21. Чтобы остановить электропривод необходимо переключить командоконтроллер в нулевое положение. В этом случае контакторы теряют питание, статорная обмотка отключается от сети и контакты КМТ оказываются разомкнутыми. Контактор КМТ снимает питание с катушки электромагнитного тормоза, и тормозные колодки накладываются на тормозной барабан. Электропривод останавливается под действием момента сопротивления Мс и момента Ммт механического тормоза.
studfiles.net
4. Функциональная схема электропривода.
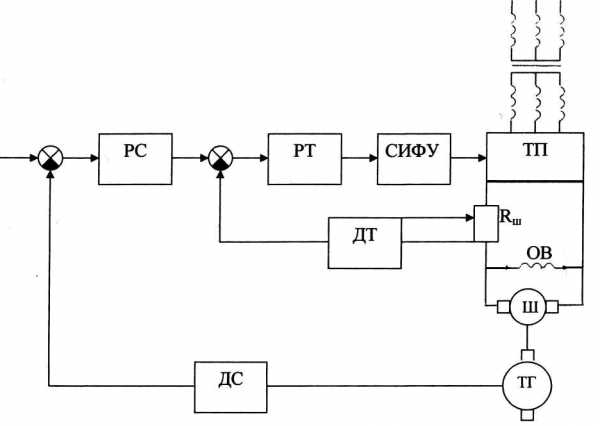
Рисунок 7 – Функциональная схема электропривода
Функциональная схема электропривода включает в себя:
Регулятор скорости;
Регулятор тока;
Система импульсного фазового управления;
Тиристорный преобразователь;
Трехфазный трансформатор;
Двигатель постоянного тока;
Шунт;
Тахогенератор.
Функциональная
схема электропривода состоит из двух
контуров. Внутренним
контуром системы является контур
регулирования тока якоря двигателя.
Сигнал отрицательной обратной связи
Uот поступает на регулятор тока через
датчик тока, который соединен с шунтом,
расположенным в цепи якоря
двигателя. Внешним контуром является
контур регулирования скорости
двигателя.
Сигнал отрицательной обратной связи
Uoc по скорости двигателя поступает
на регулятор скорости через, тахогенератор,
который расположен на валу
двигателя. Задающий сигнал тока и
скорости на двигатель поступает от
тиристорного
преобразователя, который  питается
от трехфазноготрансформатора,
через систему импульсного фазового
устройства от регулятора
скорости и тока.
питается
от трехфазноготрансформатора,
через систему импульсного фазового
устройства от регулятора
скорости и тока.
5 Выбор элементов электропривода
5.1 Тиристорный преобразователь
При выборе тиристорного преобразователя необходимо руководствоваться следующим: номинальное значения напряжения UdH, и тока IdH преобразователя должны быть больше или равны номинальным значениям напряжения Uном и тока
I яном двигателя, т.е. UdH≥ UH..
Выбираем реверсивный тиристорный преобразователь ТП:
АТРВ – 320/230 – 2С.
UdH =230 В; IdH = 320А; Р = 73,6 кВт.
5.2 Силовой трансформатор
При расчете мощности и выборе трансформатора исходными данными являются следующие основные величины: 1)Номинальное выпрямленное напряжение и ток преобразователя;
Напряжение питающей сети;
Допустимые колебания напряжения сети;
Число фаз первичной и вторичной обмоток трансформатора;
Частота сети.
Таблица 2 – Коэффициенты схемы выпрямления
Расчетные коэффициенты схемы выпрямления | ||||||
Схема выпрямления | Коэффициенты | |||||
Kcx | ав | в | Ссв | d | Кn | |
Трехфазная нулевая | 1,17 | 1 | 0,007 | 0,0148 | 0,0085 | 1,345 |
Расчет следует начинать с определения требуемого вторичного напряжения трансформатора:
(5.2)
где Kсх -коэффициент, зависящий от схемы выпрямления;
Edo – максимально – расчетное значение выпрямленной ЭДС в режиме непрерывного тока, которое определяется:
(5.2.1)
IdH– номинальное значение выпрямленного тока преобразователя;
 Rя —
активное сопротивление двигателя
с учетом сопротивления якоря,
компенсационной
обмотки и добавочных полюсов, приведенное
к рабочей температуре
80°С:
Rя —
активное сопротивление двигателя
с учетом сопротивления якоря,
компенсационной
обмотки и добавочных полюсов, приведенное
к рабочей температуре
80°С:
Rя80°c= 1,24( Rя200c +Rдп)=1,24(0,03+0,014) = 0,044 Ом (5.2.2)
amin=20°C -минимальный угол регулирования;
∆UB= 1B – падение напряжения на тиристоре;
Ксет = 1,5 — коэффициент, учитывающий индуктивность сети переменного тока;
UК%= 5% – напряжение к.з;
∆Рм%= 1% – потери меди трансформатора;
ав = 1 -коэффициент, зависящий от схемы выпрямления;
в,ссв, d – расчетные коэффициенты;
∆Uc%= 10% – возможные колебания сети.
(5.2.3)
Расчетная мощность трансформатора определяется по формуле:
S = Kсх*Еdo*IdH = 1,17 *367,8*320 = 137704,32 = 137,7кВА (5.2.4)
где kcх – коэффициент, зависящий от схемы выпрямления (см.табл.2)
По справочнику выбираем трансформатор: ТСЗ-160/10, имеющий следующие характеристики:
Таблица 3 – Характеристики трансформатора
Наименование величин | ||||||
Мощность, кВА | Напряжение, кВ | Потери,кВт | Напряжение к.з.% | Ток х.х.% | ||
Р | ВН | НН | Рх.х | Рк.з. | Uk.3. | Ix.x |
160 | 10 | 0,4 | 0,7 | 2,7 | 5,5 | 4 |
Полное сопротивление фазы трансформатора, приведенное к вторичной обмотке:
(5.2.5)
Активное сопротивление фазы трансформатора:
(5.2.6)
Индуктивное сопротивление фазы трансформатора определяется:
(5.2.7)
()
 Индуктивность
фазы трансформатора:
Индуктивность
фазы трансформатора:
(5.2.8)
studfiles.net
1 Понятие «Автоматизированный электропривод». Структурная схема аэп.
Понятие «Автоматизированный электропривод». Структурная схема АЭП.
Классификация ЭП.
Классификация по уровню автоматизации ЭП.
Задачи проектирования систем управления АЭП.
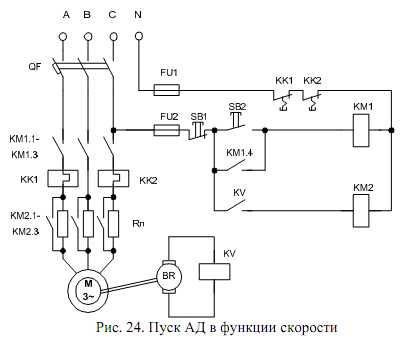
Управление пуском ЭД в функции скорости.
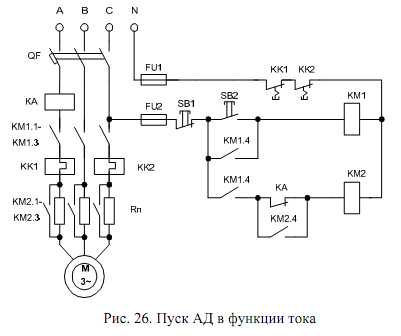
Управление пуском ЭД в функции тока.
Управление пуском ЭД в функции времени.
Автоматическое управление торможением ЭД в функции скорости.
Автоматическое управление торможением АД в функции времени.
Торможение противовключением.
Схема реверсирования АД.
Система генератор-двигатель (Г-Д).
Основные понятия частотного управления.
Экономическая оценка энерго- и ресурсосбережения.
Основные понятия управления вентиляторным, насосным и компрессорным оборудованием.
Система управления насосом с преобразователем частоты.
Управление насосом с использованием нечетной логики.
Замкнутые и разомкнутые системы линейного электропривода.
Кинематические схемы колебательных линейных электроприводов.
Система автоматического регулирования угловой скорости с жесткой обратной связью по напряжению.
Система автоматического регулирования угловой скорости с жесткой положительной ОС.
Система автоматического регулирования угловой скорости с жесткой отрицательной обратной связью по угловой скорости.
Классификация обратных связей.
Автоматическое регулирование угловой скорости асинхронных ЭП при помощи тиристорных регуляторов напряжения.
Сравнительная характеристика типов регулируемых асинхронных электроприводов.
Выбор ЭП и принципа управления лифтом.
Основные типы тиристорных преобразователей частоты.
Основные пути повышения энергетической эффективности регулируемых ЭП.
Цели и принципы автоматического управления ЭП.
Бесконтактное управление ЭП. Сущность, сравнение тиристорного и релейно-контакторного управления ЭД, схема тиристорного управления трехфазным асинхронным ЭД.
Способы управления тиристорами.
Тиристорный электропривод постоянного тока. Его характеристики.
Импульсное регулирование частоты вращения двигателя постоянного тока.
Асинхронный электропривод с тиристорным регулятором напряжения.
Частотный вентильный асинхронный электропривод.
Асинхронный электропривод с импульсным регулированием добавочного сопротивления.
Асинхронный вентильный каскад.
Особенности электропривода сепараторов.
Двухскоростной электропривод сепараторов.
Эффекты, используемые в кремниевых датчиках.
Датчики линейных перемещений.
Частотно-регулируемый асинхронный электропривод стал основным средством энергосбережения при переходе от нерегулируемого электропривода к регулируемому электроприводу. Почему?
Резервы экономии энергии и ресурсов и принципы энергосбережения.
Почему насосы и вентиляторы признаны основными объектами энергосбережения средствами электропривода.
Автоматизированный эл.привод – это эл.механическая система состоящая из эл. двигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочих машин и целенаправленного управления этими процессами.
Структурная схема приведена на рисунке 1.
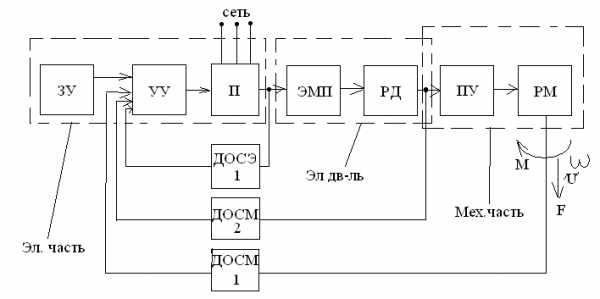
ЭМП – электродвигательное устройство.
ЗУ – задающее уст-во.
УУ – управляющее уст-во.
П – преобразователь.
ПУ – передаточное уст-во.
РМ – рабочий мех-м.
2 Классификация эп.
По роду тока
Электропривод постоянного и переменного тока.
По способу распределения механической энергии
1) Групповой ЭП
2) Индивидуальный ЭП.
3) Взаимосвязанный ЭП.
По виду движения различают реверсивный и нереверсивный ЭП поступательного либо вращательного движения.
По степени управляемости
1) нерегулируемый – для приведения в действие исполнительного органа рабочей машины с одной скоростью, параметры привода меняются только в результате возмущающих воздействий;
2) регулируемый – скорость рабочего органа может изменяться в указанных пределах, параметры привода могут меняться под воздействием управляющего устройства;
3) программно-управляемый – скорость вращения изменяется согласно некоторой программе;
4) следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определённой точностью в соответствии с произвольно меняющимся задающим сигналом;
5) адаптивный – автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
По роду передаточного устройства
1) Редукторный;
2) Безредукторный;
3 Классификация по уровню автоматизации эп.
1) Неавтоматизированный. Управление осуществляется в ручную. Применяется в установках малой мощности, бытовой и медицинской технике.
2) Автоматизированный. Регулирование параметров происходит автоматически, управляющие команды задаются вручную.
3) Автоматический. Управляющие воздействия вырабатываются автоматически, без участия оператора.
4 Задачи проектирования систем управления АЭП.
Электропривод позволяет эффективно решать сложные и ответственные задачи, связанные с повышением производительности, точности и автоматизации оборудования.
Задачи:
– расчет механической части электропривода;
– расчет силовой части системы управления;
– расчет информационной части системы управления;
– расчет энергетических показателей эл.привода;
5 Управление пуском ЭД в функции скорости.
6 Управление пуском ЭД в функции тока.
7 Управление пуском ЭД в функции времени.
8 Автоматическое управление торможением ЭД в функции скорости.
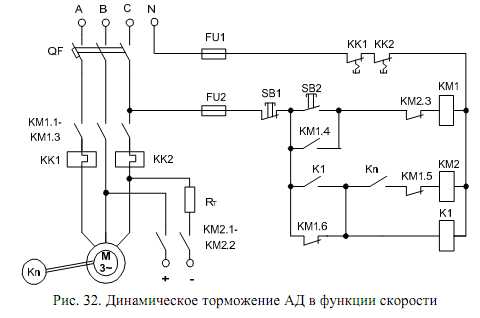
9 Автоматическое управление торможением АД в функции времени.

Торможение противовключением.
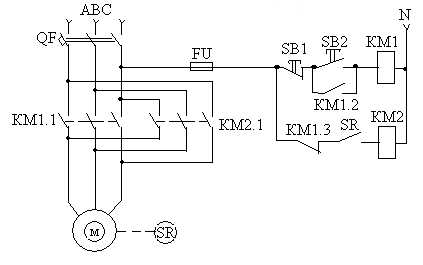
Схема реверсирования АД.
12 Система генератор-двигатель (Г-Д).
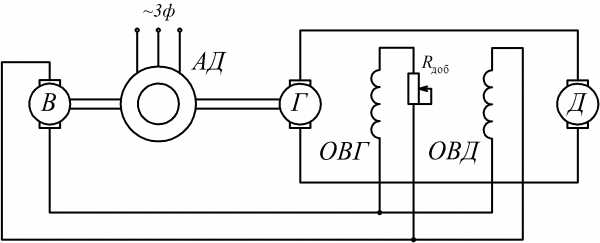
Она состоит из приводного двигателя Д, который механически связан с генератором постоянного тока Г. Величина ЭДС генератора регулируется путем изменения напряжения на обмотке возбуждения генератора. Якоря генератора и двигателя электрически связаны друг с другом. Регулируемым параметром в данном случае выступает величина ЭДС двигателя. Для обеспечения магнитного потока в двигателе и генераторе используется возбудитель, который представляет собой ДПТ меньшей мощности . В настоящее время в качестве возбудителей используются полупроводниковые преобразователи.
Из уравнения равновесия напряжений по второму закону Ома можно составить уравнение ЭДС
,
где  – ЭДС генератора,
– ЭДС генератора, – сопротивления якоря генератора.
– сопротивления якоря генератора.
Подставив в это уравнение и тока двигателя, получаем уравнение мех. хар-к:
.
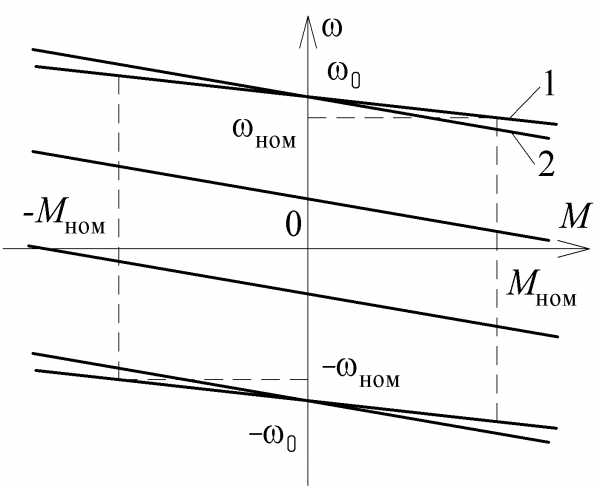
Вид механических характеристик представлен на рис. Относительное падение напряжения в этой системе в вдвое выше (прямая 2), чем у естественной характеристики двигателя (прямая 1). Обуславливается это наличием сопротивления генератора, которое примерно равно сопротивлению якоря двигателя, так как машины примерно одинаковой мощности.
Достоинство – высокая плавность регулирования скорости двигателя.
Недостаток: низкий КПД.
studfiles.net